指定された駅へ行くため乗りかえようとした電車は3両しかなく、走り始めると所々に錆色目立つ工場の風景に変わる。小学校時分に必死で覚えた「京浜工業地帯」という言葉を久しぶりに思い出した。着いた駅舎の向こうには古いコーラの看板が見える。「昭和だな。」最先端のロボットがこういう街で開発されているギャップを不思議に感じた。
とはいえ、実はIRSが全てのロボットを開発しているわけではない。各大学が独自のコンセプトで開発し、互いに切磋琢磨している。当面の目標は前回ご説明した通り、被災地における情報収集力の強化であり、それに特化したロボットばかりである。
今回、A部長以外全員で取材に訪れたF営業部員達。昔は体育館だったというラボ(研究室)にいよいよ足を踏み入れる。 |
 |
 |
B主任: |
ほぅ・・・なんというか、学園祭みたいな雰囲気やな。 |
|
 |
D職員: |
あるいは「廃墟探検とラジコンが趣味の大学教授の部屋」とか |
|
 |
C主任: |
事務局と開発と実証フィールドを室内であわせ持たせれば、こうなるよね。 |
|
| その日はロボットの公開実験日であった。彼ら以外にも大きなカメラを背負った人が数多く行きかっている。IRS広報担当者も各大学の先生もマスコミ対応に忙しそうだ。多くのロボットが唸りをあげる中、いやでも目立つ存在があった。飛行船である。 |
 |
|
D職員: |
ナイター中継とかでも見ますよね。ヒーローインタビューの後ろで広告つけて飛んでましたよ。 |
|
|
C主任: |
これもロボットかな。 |
|
|
B主任: |
そやろう。自律飛行とかするんやないか。 |
|
 |
 |
| 確かに東京ドームでみたような気がします。 |
| ©IRS、独立行政法人理化学研究所 |
|
自律飛行船ロボット |
上空を比較的低速で,長時間自律飛行することにより,
より詳しい被災地の情報を上空から取得するロボット.
航空機やヘリコプターよりも騒音や風害が少ないのが利点. |
上空からカメラを用いて被災地の地図を作るだけでなく,
助けを求める人や車の動きなども計測し,地図に書き込むことが出来る. |
飛行船はまた通信中継用の空中基地としても働き,
インターネットが使えない場合でも,レスキュー隊員やロボット,
レスキュー・コミュニケータなどの連絡を取り持ったり,
収集した情報をまとめて基地に持ち帰ったりすることが出来る. |
平常時は広告塔や,湾岸や原子力発電所などの警備としても利用する.
|
| スペック(現在の屋内実験用モデル): |
| 全長 |
: |
6.5m |
| 最大径 |
: |
3.0m |
| 過般重量 |
: |
8kg |
| スペック(将来の屋外実用化モデル): |
| 全長 |
: |
18.0m |
| 最大径 |
: |
3.6m |
| 過般重量 |
: |
8kg |
| 最大速度 |
: |
時速52km |
|
コンピュータによる自動制御と
ラジオコントロールによる手動制御が切替可能. |
| 研究代表者:独立行政法人理化学研究所 川端邦明 |
|
 |
|
|
D職員: |
空飛ぶ情報センターですね。航空自衛隊にも情報収集用の飛行機があったような*1・・・ |
|
|
B主任: |
この紹介文で大事なのはだな「平常時は広告塔や警備用としても利用する」というとこや。いくら謎の大金持ちがスポンサーとはいえ、日頃から健気に働く気やで。見上げたもんや。 |
|
|
D職員: |
「BGMは芦屋雁之助*2」って感じの言いっぷり・・・ |
|
|
B主任: |
きっと、この子は将来、黄色と黒の縞模様に塗られる日が来るで。 |
|
|
C主任: |
(無視して)やはり実践に勝るノウハウの獲得方法はないからね。 |
|
|
D職員: |
うちの現場でも測量とか写真撮影とか、すぐにでも大活躍できそうですね。 |
|
|
B主任: |
ただ過般重量が8kgちゅうのはちょっと寂しいのぅ。セメントの袋一つ運べんな・・・しかし、この「レスキュー・コミュニケータ」ちゅうのはなんやろか。 |
|
|
C主任: |
えーと、これじゃないか。 |
|
|
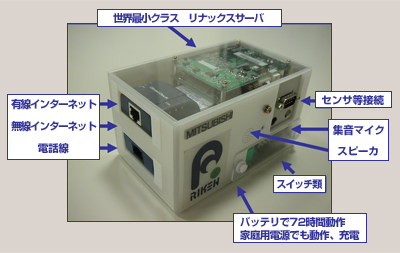 |
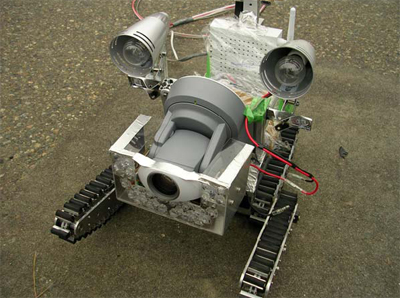
| 昔の電子頭脳ってこういうイメージでしたね |
| ©IRS |
|
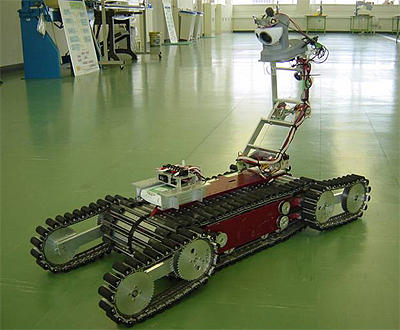
レスキュー・コミュニケータ |
緊急時に声などによって情報を集めることが出来る装置.
電気やインターネットが使えない場合でも自力で情報を伝える
機能を持っているのが特徴.各家屋内の壁や天井に予め設置しておくことで,
災害時に生き埋もれになった人を探すだけでなく,
平常時にも警備・見守りや,音声案内に利用することが出来る.
飛行船やロボット,レスキュー隊員と連携することによって,
より早く広いエリアで効率的にレスキュー活動を行うことが出来る.
|
| スペック: |
| CPU |
: |
SH4(SH7751R) 100MHz |
| OS |
: |
CE_Linux1.0 (Linux2.4.20) |
| RAM |
: |
RAM 32MB |
| ROM |
: |
FLASH ROM 8MB,CFディスク |
| 拡張スロット |
: |
コンパクトフラッシュスロット * 3 |
無線LAN,有線LAN,モデム,防災無線,赤外線等により通信.
アドホックネットワーク機能によりインターネットがなくても情報を
伝えることが出来る.
音声の録音再生,地震(振動)検知センサ,人体検知センサ,等を利用可能.
家庭用コンセントを利用可能,または内蔵バッテリにて72時間動作.
|
| 大きさ |
: |
Aタイプ 87.5mm×142.5mm×79.0mm, 985cc3 |
| |
|
Bタイプ 87.5mm× 92.0mm×79.0mm, 635cc3 |
|
| 研究代表者:東京大学 淺間一 |
|
|
|
|
|
C主任: |
瓦礫の中の捜索は困難だから、あらかじめ仕込んでおく発想か。 |
|
|
B主任: |
凄いで。世界初の「微動だにしない」ロボットや・・・しっかしカタカナ*3が多いのぅ。 |
|
|
D職員: |
アドホックってよくわからないけど、これ自体が情報ネットワークを形成するってことでしょ。だとすればこれもウチの現場、特に電波の飛びが悪いトンネル現場なんかのデータ収集には持って来いですね。 |
|
|
C主任: |
これ、日頃は防犯装置として機能させればコストメリットも訴求できそうだ。面白いな。 |
|
|
D職員: |
でも録音再生機能*4があるから、なんだか盗聴気分でドキドキです。 |
|
|
B主任: |
なにがドキドキや。お前の部屋を盗聴しても「アニメのCD」となんら変わらんやないか。 |
|
|
D職員: |
あ、言いましたね。自分だってOJTを「おじさんがじっくりトレーニング」とか、いい加減な説明したくせに。 |
|
|
B主任: |
だいたい合っとるやないか。おれは並外れた直観力で、暗黙知の世界に生きる男なのや。 |
|
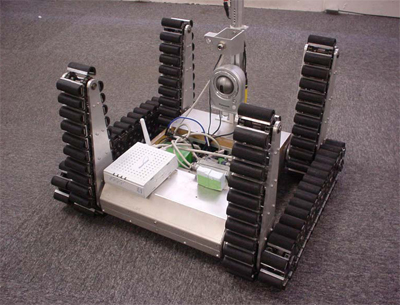
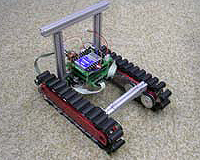
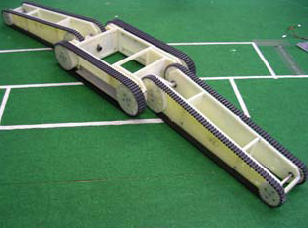
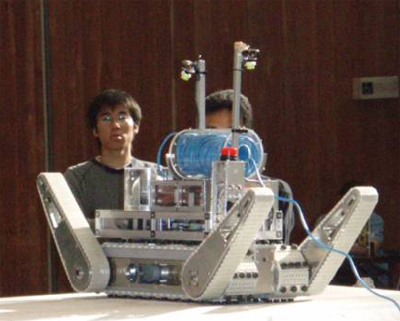
| 次に3人の目を引いたのは、瓦礫に向かって必死に突っ込んでいる、くさび状ロボットの姿であった。 |
|
|
B主任: |
これもなんか健気やのう。わいの琴線に触れる、何かをもっとる。 |
|
|
C主任: |
この動きを文章だけで説明するのは非常に難しいだろうな。 |
|
 |
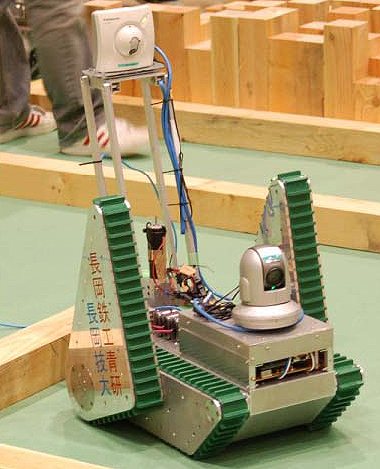
| 確かに「バリバリ」中に入っていってくれそうです! |
| ©IRS |
|
Bari-bari-Ⅱ |
東京工業大学 北川・塚越研究室
|
文章では伝わらないということで、健気で必死なその勇姿を動画でどうぞ。
ブロードバンド用はこちら
ナローバンド用はこちら |
|
|
|
|
|
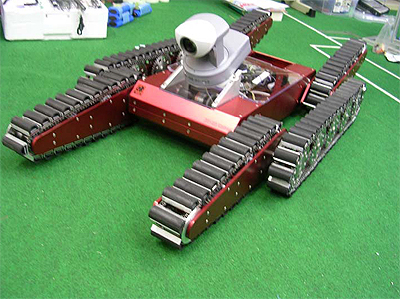
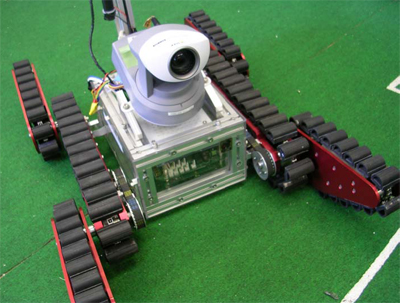
D職員: |
目的特化の潔さと言えば、このロボットも外せません。 |
|
|
B主任: |
ネーミングの傾向も、似とるしな。 |
|
|
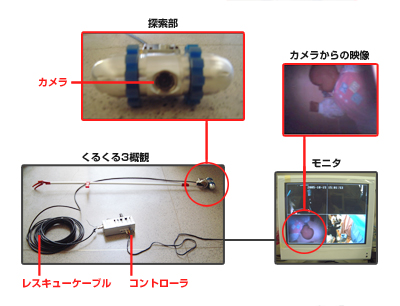 |
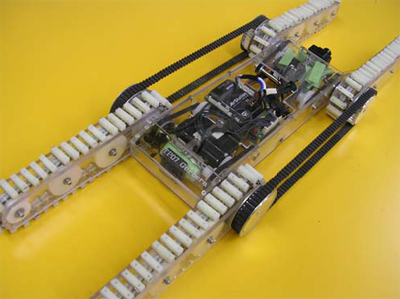
| 極めて実践的なコンセプトのロボットの3代目 |
| ©IRS |
|
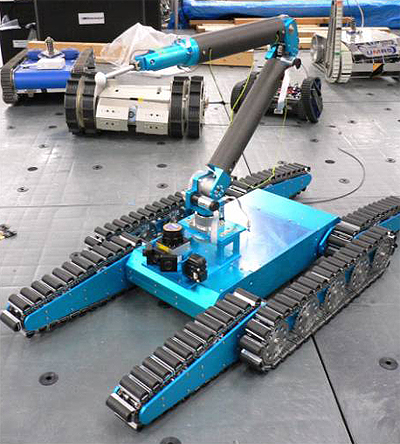
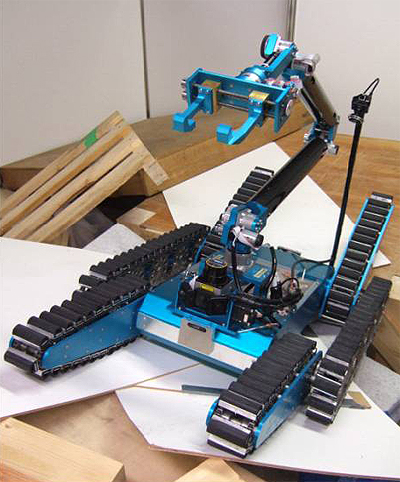
くるくる3 |
礫内部へと進入するアドバンスドツールとして,簡易探索機「くるくる3」を開発した。
「くるくる3」は探索部と棒部分からなっており,探索部は着脱式になっている.
分離前は棒カメラとして使用でき,瓦礫内部へ差し込んだ後,分離して探索する。
カメラ,LEDライト,マイクそしてスピーカを備えており,映像と音声で行方不明者を探索する。
電源は,バッテリやコンセントからの他,手動発電にも対応している。
|
| スペック: |
| 寸法 |
: |
200x200x85mm |
| 車輪径 |
: |
85mm |
| 重量 |
: |
2.5kg |
|
| 研究代表者:大阪府立工業高等専門学校 土井智晴 |
|
|
|
|
|
B主任: |
こういうのが案外現場で活躍するかもしれんで。 |
|
|
C主任: |
一方で瓦礫などの間にはまってしまう危険性はあるかクローラ*5型に分類できそうだね。 |
|
|
B主任: |
(時計を見ながら)もうこんな時間か。ペースあげな全部見られへんで。 |
|
|
D職員: |
ちょっとペースアップで行きましょう。 |
|
 |
|