技術の概要
前田式無人化機械土工システムは、無人化施工において、作業箇所と操作室の間に多重伝送装置を使用した中継設備を設けることで、作業箇所から約1,000m以上離れた場所からモニター画面だけを見ながらラジコン建設機械を遠隔操縦し、掘削・積込、運搬、土砂撒き出し、整地および転石破砕作業を実施するシステムです。
技術の特徴
ブルドーザ、バックホウ、不整地運搬車の組み合わせを基本とし、以下の特徴を有します。
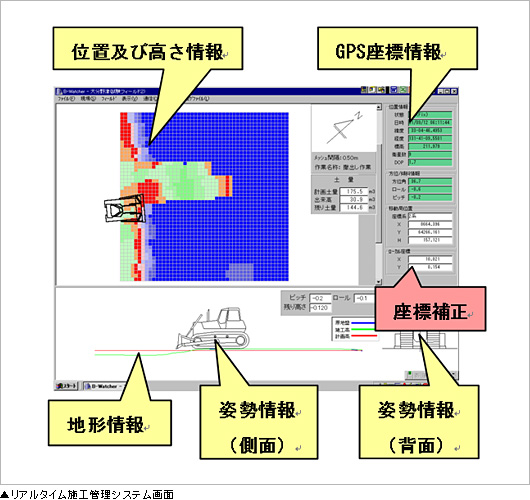
- 1.リアルタイム施工管理の採用により施工効率が向上します。
- 2.ブルドーザ姿勢の補正により施工精度が向上します。
- 3.中継設備設置により施工条件への適用性が向上します。
メリット
- 1.施工管理システムにより、出来形と出来高をリアルタイムで把握できるため、映像装置から得られる映像情報のみの場合と比べオペレータの操作効率が向上します。
- 2.ブルドーザにGPS2基と傾斜計を付けることにより、ブルドーザ傾斜時の位置補正を行うことが出来ると共に、より精密なブレード操作が可能で、排水勾配など傾斜地形の無人化施工が可能です。
- 3.多重伝送装置を用いた中継設備を設けることで、超遠隔化、電波障害物回避を図ると共に同一地域における使用無線回線数を節約し干渉等伝送障害発生を防いでおり、同一エリア内での複数の重機操縦を容易にしています。
特記事項
- 1.地形条件により天空開放状況が悪くGPS測量出来ない場所については、自動追尾式トータルステーションを用いる場合があります。
- 2.信号伝送に簡易無線(50GHz)を使用する場合は免許申請する必要があります。
- 実績
- 性能確認試験 大分県大野郡野津町(H13.11)
- 外部評価
- (社)日本建設機械化協会 建設技術審査証明 H24.3更新
- NETIS登録No.
- SK-060025-V
- 適用工種
- 土工事、災害復旧工事、汚染物質除去作業
- 関連資料
-
「無人化施工における超遠隔操縦化とリアルタイム施工管理」
第9回建設ロボットシンポジウム H14.7