技術の概要
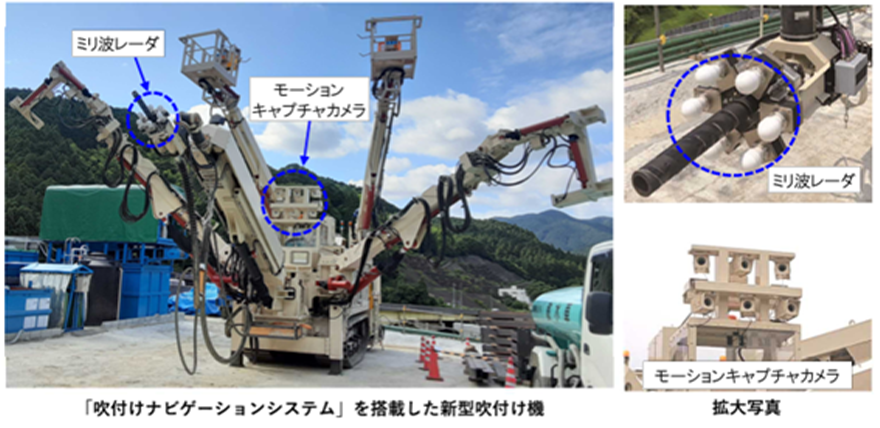
前田建設工業株式会社がエフティーエス株式会社、清水建設株式会社、戸田建設株式会社、西松建設株式会社と共同で開発した、山岳トンネル工事における吹付け工の施工操作と出来形をリアルタイム・デジタル管理するシステムです。ミリ波レーダ技術、モーションキャプチャ技術、吹付けロボット技術、機体位置測定技術を組み合わせることで、吹付けノズルの位置座標・方向と吹付けコンクリートの出来形をリアルタイムに可視化し、施工管理の精度を向上させます。
技術の特徴
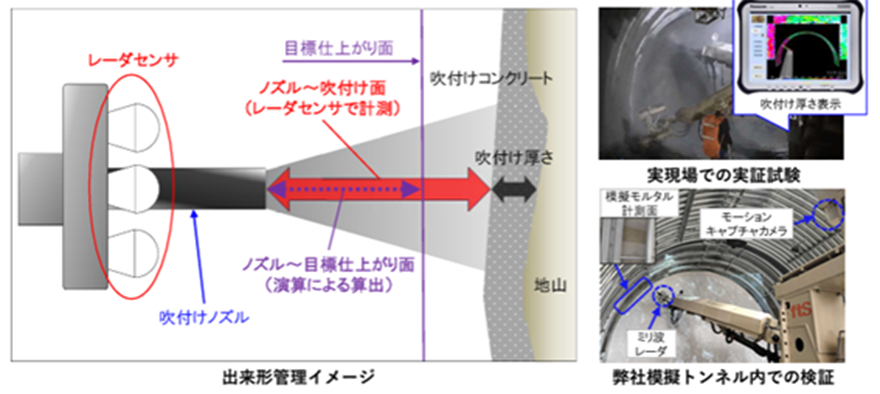
- 1.ミリ波レーダ技術:吹付けノズル周囲に取り付けられたレーダセンサでノズルから吹付け面までの距離を計測し、吹付け厚さを管理。
- 2.モーションキャプチャ技術:モーションキャプチャカメラを用いて、ブームのたわみを考慮したノズル位置座標を計測。
- 3.吹付けロボット技術:伸縮計とエンコーダのデータを基に、吹付けノズルおよびレーダの位置座標と方向を特定。
- 4.機体位置測定技術:坑内のトータルステーションにより、機体とモーションキャプチャカメラの位置座標を特定。
これらの技術を組み合わせることで、吹付けノズルの位置座標・方向と吹付けコンクリートの出来形をリアルタイムにタブレットなどで可視化可能となり、施工管理の精度が向上します。
メリット
- 品質向上:ミリ波レーダによる吹付け厚さの管理により、出来形精度が向上。
- 生産性向上:ノズルの距離と角度を正確に制御することで、リバウンド(反発による無駄)を低減。
- 安全性向上:吹付け厚さを確認するために切羽(作業面)近傍へ近づく必要がなくなるため、作業員の安全が確保される。
特記事項
- 実績
- 共同開発企業による山岳トンネル工事での実証実験実績あり。
- 適用工種
- 山岳トンネル工事の吹付けコンクリート施工。
- 関連資料
- なし
- 備考
- 本システムは複数の最新技術を組み合わせており、他のトンネル施工技術への応用も検討可能。